پ@پ،پ@Xport‚ة‚و‚éپ@PC(Windows)پ|PICٹش’تگMپ@پ@پ@پ@پ@پ@پ@ پ@پ@
پ@پ@
پ@پ@پ@PC‚جWindowsƒ\ƒtƒg‚©‚ç Xport‚ً‚آ‚©‚ء‚ؤ“dژq‰ٌکH‚ًگ§Œن‚·‚é‚ة‚حپALantronixژذ‚©‚ç’ٌ‹ں‚³‚ê‚ؤ‚¢‚é
ComPortRedirector‚ئ‚¢‚¤ƒ\ƒtƒg‚ً‚آ‚©‚¤‚ئٹب’P‚ةگ§Œن‚إ‚«‚ـ‚·پBComPortRedirector‚حXport‚âWiport
پi–³گüƒfƒoƒCƒXƒTپ[ƒoپj‚ب‚ا Lantronixگ»•i‚©‚ç‚جTCP/IPگMچ†‚ًRS232CƒVƒٹƒAƒ‹گMچ†‚ة‘ٹŒف•دٹ·‚·‚é
پ@پ@ƒ\ƒtƒg‚إ‚·پB ‚±‚ê‚ًƒCƒ“ƒXƒgپ[ƒ‹‚µ‚ؤ‰¼‘zCOM ƒ|پ[ƒg‚ةڈٹ’è‚جگف’è‚ً‚¨‚±‚ب‚¤‚ئپAWindowsƒAƒvƒٹƒPپ[ƒVƒ‡ƒ“
پ@پ@‚©‚ç‚حCOMƒ|پ[ƒgŒo—R RS232C‚إگ§Œن‚·‚é‚ج‚ئ‘S‚“¯‚¶‚ة گ§Œن‚إ‚«‚ـ‚·پB
پ@پ@
پ@پ@پƒژژچى•iژd—lپ„
پ@پ@پ@پڑپ@PCپiWindows)‘¤
پ@پ@پ@پ@پ@پ@پEپ@ƒAƒvƒٹƒPپ[ƒVƒ‡ƒ“ƒ\ƒtƒg‚©‚ç‰pگ”ژڑ‚ً‚Pپ`1000msec–ˆ‚ة‚P•¶ژڑ‚أ‚آˆب‰؛‚جŒoکH‚إPIC‘¤‚ة‘—‚éپB
پ@پ@پ@پ@پ@پ@پ@پ@پ@‰¼‘zCOM‚Rƒ|پ[ƒgپiComPortRedirectorپjپ@پ¨پ@LANƒPپ[ƒuƒ‹پiTCP/IP)پ@پ¨پ@Xportپ@پ¨پ@PIC
پ@پ@پ@پ@پ@پ@پEپ@‘—گM‚µ‚ؤ‚¢‚镶ژڑپAژَگM‚µ‚ؤ‚¢‚镶ژڑ‚ً•\ژ¦‚·‚邱‚ئ
پ@پ@پ@پ@پ@پ@پEپ@ژَگM‚µ‚½•¶ژڑ‚ًƒGƒfƒBƒ^ƒٹƒXƒg‚ة•\ژ¦‚·‚邱‚ئپB‚ـ‚½•K—v‚ة‰‚¶‚ؤƒGƒfƒBƒ^ƒٹƒXƒg‚حƒNƒٹƒA‚إ‚«‚邱‚ئ
پ@پ@پ@پڑ PIC‘¤
پ@پ@پ@پ@پ@پ@پEپ@ژَگM‚µ‚½•¶ژڑ‚ًPC‘¤‚ة‘—گM‚·‚邱‚ئ
پ@پ@پ@پ@پ@پ@پEپ@Xport‚جCTSپARTS‚ًژg‚ء‚½ƒnپ[ƒhƒEƒFƒAƒtƒچپ[گ§Œن‚ًچs‚¢پAژٹش‚ج‚©‚©‚é‰tڈ»•\ژ¦’†‚ة•¶ژڑ‚جژَگM
پ@پ@پ@پ@پ@پ@پ@پ@‚ب‚ا‚ً”ً‚¯‚½ƒGƒ‰پ[‚ھ‚¨‚±‚è‚ة‚‚¢گ§Œن‚ً‚¨‚±‚ب‚¤‚±‚ئ
پ@پ@پ@پ@پ@پ@پEپ@‰tڈ»پi‚P‚U•¶ژڑپ~‚QŒ…پj‚ة‚حژَگM‚µ‚½•¶ژڑ‚ًڈ‡ژں•\ژ¦‚µ‚ؤ‚ن‚‚±‚ئپB•¶ژڑ‚ھ‚¢‚ء‚د‚¢‚ة‚ب‚ء‚½‚ç‰و–ت‚ً
پ@پ@پ@پ@پ@پ@پ@پ@ƒNƒٹƒA‚µ‚ؤ‚ـ‚½ژَگM‚µ‚½•¶ژڑ‚ًڈ‡ژں•\ژ¦‚µ‚ؤ‚ن‚‚±‚ئ
پ@پ@پ@پ@پ@پ@پ@
پ@پ@پƒ‰ٌکHگ}پ„
پ@پ@پ@پEپ@پ@PIC18F452‚ً‚آ‚©‚ء‚½ڈêچ‡‚ج‰ٌکHگ}‚ًˆب‰؛‚ةژ¦‚µ‚ـ‚·پB(پ¨‰ٌکHگ}‚ج‚جPDFƒtƒ@ƒCƒ‹پj
پ@
پ@ پڑƒnƒu+ƒ‹پ[ƒ^‚ًڈœ‚¢‚ؤPC‚ئXport‚ًƒNƒچƒXƒPپ[ƒuƒ‹‚إ’¼Œ‹‚µ‚ؤ‚à“®چى‚µ‚ـ‚µ‚½پB‚±‚جڈêچ‡پAPC‚جDHCPپiDynamic
Host
Configuration Protocol)‹@”\‚حOFF‚ئ‚µ‚ؤژè“®‚إURL‚ًگف’è‚·‚é•K—v‚ھ‚ ‚è‚ـ‚·پB
پ@پ@
پ@پ@پƒژژچى•iٹOٹدپ„پ@پ@‰؛‹L‚جژتگ^‚ة‚حڈم‹L‰ٌکHگ}‚ة‚ح‚ب‚¢پA‚ـ‚½–{ƒeپ[ƒ}‚ئٹضŒW‚ج‚ب‚¢•”•i‚ھ‘½پXژت‚ء‚ؤ‚¢‚ـ‚·پB
پ@پ@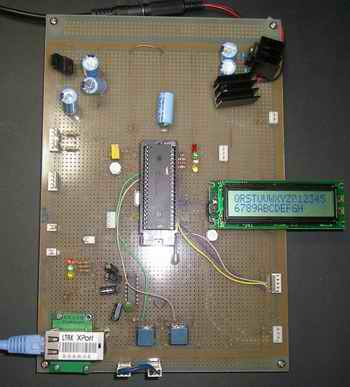
| ˆب‰؛‚جƒvƒچƒOƒ‰ƒ€—ل‚ج’†‚ة‚ ‚é‰tڈ»•\ژ¦ٹيگ§Œنƒ‰ƒCƒuƒ‰ƒٹپ@1llcd_lib.c‚حپ@Œمٹص“N–炳‚ٌ‚ھگفŒv‚³‚ꂽ‚à‚ج‚إ‚·پB |
|
پ@پ@پƒƒvƒچƒOƒ‰ƒ€—لپ@PIC‘¤پ@پ„
/*
------------------------------------------------------------------
< چ\گ¬>
پ@BuilderپiPCپjپ@پ¨ ComportRedirectorپ¨پ@Xportپ@پ¨پ@PIC18F452پ@پ¨پ@16•¶ژڑƒLƒƒƒ‰ƒNƒ^‰tڈ»
<PC program> ‰pگ”ژڑ‚P•¶ژڑ‘—گMپ@ژüٹْ‚P000پ`1msec
<”ُچl> Xport‘¤ پ@IP address 192.168.0.44
Local port 14001
PC(Windows)‘¤ IPپ@adress 192.168.0.2 پ@پ@
TCP port (remote port) 3001
پ@ پ@پ@پ@ // COM Port: desk/note PC COM3/COM4 2006.9.25
--------------------------------------------------------------------
*/
#include "18f452.h"
#use delay(clock=40000000)
#FUSES EC,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7) // TX=RC6,RX=RC7
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// ‰tڈ»
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
main(){
unsigned int moji = 0 ;
char cmnd;
setup_timer_1(T1_INTERNAL |T1_DIV_BY_8);
set_tris_c(0b10000000);// •Kگ{ in = RC7 of Rx
lcd_init();
lcd_cmd(0b00001100); // ƒJپ[ƒ\ƒ‹:OFF ƒuطف¸:OFF
lcd_clear();
printf(lcd_data,"start!!");
delay_ms(2000);
lcd_clear();
while(1)
{
cmnd = getc();
if(input(PIN_C0) == 1)putc(cmnd);//Xport‚جCP1’[ژq‚©‚ç‘—گM‹–‰آ‚جگMچ†‚ھ‚إ‚ؤ‚¢‚ê‚خ‘—گM‚·‚é
//CP1پi‚U”ش’[ژqپj‚ًپ@CTSپiClear To Send ‘—گM‹–‘ّپj‚ةگف’è
//CP1‚حڈo—حƒ|پ[ƒgƒ‚پ[ƒh
//CTSگMچ†پF ‚P =پ@‘—گM‹–‰آپ@پAپ@0 = ‘—گM•s‰آ
output_low(PIN_C2); // Xport‚جCP3’[ژq‚ض‘—گM‹ضژ~گMچ†‚ًڈo—حپ@پ@RTS= 0
// CP2پi‚W”ش’[ژqپj‚ًRTSپiRequest To Send ‘—گM—v‹پپj)
//CP3‚ح“ü—حƒ|پ[ƒgƒ‚پ[ƒhپ@
//RTSگMچ†پFپ@‚P = ‘—گM‹–‰آ پA0 = ‘—گM•s‰آ
moji++;
switch(moji)
{
case 16: lcd_cmd(0xC0); //پ@‚Qچs–ع‚جگو“ھ‚ض
break;
case 32: lcd_cmd(0x01); //پ@‘Sڈء‹ژ
moji = 0;
break;
default: //
break;
}
lcd_data(cmnd);
output_high(PIN_C2); //Xport‚©‚ç‚ج‘—گM‹–‰آ RTS = 1
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//ƒCƒ“ƒNƒ‹پ[ƒhƒtƒ@ƒCƒ‹ 1lcd_lib.c
//‚±‚جƒtƒ@ƒCƒ‹‚حŒمٹص“N–炳‚ٌ‚ھگفŒv‚³‚ꂽ‚à‚ج‚إ‚·
//**************************************
///////////////////////////////////////////////
// ‰tڈ»•\ژ¦ٹيگ§Œنƒ‰ƒCƒuƒ‰ƒٹ
// “à‘ ٹضگ”‚حˆب‰؛
// lcd_init() ----- ڈ‰ٹْ‰»
// lcd_cmd(cmd) ----- ƒRƒ}ƒ“ƒhڈo—ح
// lcd_data(chr) ----- ‚P•¶ژڑ•\ژ¦ڈo—ح
// lcd_clear() ----- ‘Sڈء‹ژ
//////// ƒfپ[ƒ^ڈo—حƒTƒuٹضگ”
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //•\ژ¦ƒfپ[ƒ^‚جڈêچ‡
else
output_low(rs); //ƒRƒ}ƒ“ƒhƒfپ[ƒ^‚جڈêچ‡
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// ‚P•¶ژڑ•\ژ¦ٹضگ”
void lcd_data(int asci)
{
lcd_out(asci, 0); //ڈمˆت‚Sƒrƒbƒgڈo—ح
lcd_out(asci<<4, 0); //‰؛ˆت‚Sƒrƒbƒgڈo—ح
delay_us(50); //50ƒتsec‘ز‚؟
}
/////// ƒRƒ}ƒ“ƒhڈo—حٹضگ”
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //ڈمˆت‚Sƒrƒbƒgڈo—ح
lcd_out(cmd<<4, 1); //‰؛ˆت‚Sƒrƒbƒgڈo—ح
delay_ms(2); //2msec‘ز‚؟
}
/////// ‘Sڈء‹ژٹضگ”
void lcd_clear()
{
lcd_cmd(0x01); //ڈ‰ٹْ‰»ƒRƒ}ƒ“ƒhڈo—ح
delay_ms(15); //15msec‘ز‚؟
}
/////// ڈ‰ٹْ‰»ٹضگ”
void lcd_init()
{
set_tris_x(mode); //ƒ‚پ[ƒhƒZƒbƒg
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
//**************************************************************************************
//**************************************************************************************
// پƒپ@ƒvƒچƒOƒ‰ƒ€—لپ@پ@پ@Windows‘¤پ@پ„
//
//پ@‚±‚جƒvƒچƒOƒ‰ƒ€‚حپ@C++ Buider Ver.6 ‚إ‚©‚©‚ê‚ؤ‚¢‚ـ‚·پBپ@ƒvƒچƒOƒ‰ƒ€‚جƒ\پ[ƒXƒRپ[ƒh
//**************************************************************************************
//**************************************************************************************
#include <vcl.h>
#include <stdio.h>
#pragma hdrstop
#include "Unit1.h"
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma link "MsTimer"
#pragma resource "*.dfm"
TForm1 *Form1;
HANDLE hPort; // ƒ|پ[ƒgƒnƒ“ƒhƒ‹
BYTE bSendBuffer[1]; // ‘—گMƒfپ[ƒ^
DWORD dwSendSize; // ‘—گMƒfپ[ƒ^ƒTƒCƒY
DCB dcb; // DCBچ\‘¢‘ج
COMMTIMEOUTS Timeout; // COMMTIMEOUTSچ\‘¢‘ج
BOOL Ret; // ٹضگ”–ك‚è’l
int n; // ƒ‹پ[ƒv—p
char In[1];
DWORD lRead;
unsigned int count = 47;
unsigned long int posCount=0;
//---------------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
// ƒ|پ[ƒgڈ‰ٹْ‰»
hPort = CreateFile("COM3", GENERIC_READ | GENERIC_WRITE, 0, NULL,
OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL);
if(hPort == INVALID_HANDLE_VALUE){
printf("Port could not open.\n");
exit(0);
}
// ‘—ژَگMƒoƒbƒtƒ@ڈ‰ٹْ‰»
Ret = SetupComm(hPort, 512, 512);
if(Ret == FALSE){
printf("SetupComm failed.\n");
CloseHandle(hPort);
exit(0);
}
Ret = PurgeComm(hPort, PURGE_TXABORT | PURGE_RXABORT | PURGE_TXCLEAR | PURGE_RXCLEAR);
if(Ret == FALSE){
printf("PurgeComm failed.\n");
CloseHandle(hPort);
exit(0);
}
/*
// ƒ^ƒCƒ€ƒAƒEƒgگف’è [msec]پ@ COMMTIMEOUTSچ\‘¢‘ج‚إگف’è
Timeout.ReadIntervalTimeout = 500; // •¶ژڑ“اچژ‚ج‘S‘ج‚ج‘ز‚؟ژٹش
Timeout.ReadTotalTimeoutMultiplier = 0; //“اچ‚ج‚P•¶ژڑ‚ ‚½‚è‚جژٹش
Timeout.ReadTotalTimeoutConstant = 500; //“اچƒGƒ‰پ[Œںڈo—p‚جƒ^ƒCƒ€ƒAƒEƒgژٹش
Timeout.WriteTotalTimeoutMultiplier = 0; //ڈ‘‚«چ‚ف‚P•¶ژڑ‚ ‚½‚è‚ج‘ز‚؟ژٹش
Timeout.WriteTotalTimeoutConstant = 500;//ڈ‘‚«چ‚فƒGƒ‰پ[Œںڈo—p‚جƒ^ƒCƒ€ƒAƒEƒgژٹش
*/
// ƒ^ƒCƒ€ƒAƒEƒgگف’è [msec]پ@ COMMTIMEOUTSچ\‘¢‘ج‚إگف’è
Timeout.ReadIntervalTimeout = 5; // •¶ژڑ“اچژ‚ج‘S‘ج‚ج‘ز‚؟ژٹش
Timeout.ReadTotalTimeoutMultiplier = 0; //“اچ‚ج‚P•¶ژڑ‚ ‚½‚è‚جژٹش
Timeout.ReadTotalTimeoutConstant = 5; //“اچƒGƒ‰پ[Œںڈo—p‚جƒ^ƒCƒ€ƒAƒEƒgژٹش
Timeout.WriteTotalTimeoutMultiplier = 0; //ڈ‘‚«چ‚ف‚P•¶ژڑ‚ ‚½‚è‚ج‘ز‚؟ژٹش
Timeout.WriteTotalTimeoutConstant = 5;//ڈ‘‚«چ‚فƒGƒ‰پ[Œںڈo—p‚جƒ^ƒCƒ€ƒAƒEƒgژٹش
Ret = SetCommTimeouts(hPort, &Timeout);
if(Ret == FALSE){
printf("SetCommTimeouts failed.\n");
CloseHandle(hPort);
exit(0);
}
// ’تگMگف’è پ¨پ@ DCBپi ƒfƒoƒCƒXگ§ŒنƒuƒچƒbƒNپjچ\‘¢‘ج‚ض‚جƒ|ƒCƒ“ƒ^
Ret = GetCommState(hPort, &dcb);
if(Ret == FALSE){
printf("GetCommState failed.\n");
CloseHandle(hPort);
exit(0);
}
dcb.BaudRate = 9600;
dcb.Parity = 0;
dcb.StopBits = ONESTOPBIT;
dcb.ByteSize = 8;
Ret = SetCommState(hPort, &dcb);
if(Ret == FALSE){
printf("SetCommState failed.\n");
CloseHandle(hPort);
exit(0);
}
Button1->Tag = false ;
ComboBox1->ItemIndex = 0;
MsTimer1->Interval = 1000;
RichEdit1->Lines->Clear();
}
//---------------------------------------------------------------------------
void __fastcall TForm1::FormClose(TObject *Sender, TCloseAction &Action)
{
// ڈI—¹ڈˆ—
CloseHandle(hPort);
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{
if(Button1->Tag == false)
{
Button1->Tag = true;
Button1->Caption = "‘—گM’âژ~";
MsTimer1->Enabled = true;
}
else
{
Button1->Tag = false;
Button1->Caption = "‘—گMٹJژn";
MsTimer1->Enabled = false;
}
}
//---------------------------------------------------------------------------
void __fastcall TForm1::ComboBox1Change(TObject *Sender)
{
switch(ComboBox1->ItemIndex)
{
case 0: MsTimer1->Interval = 1000; break;
case 1: MsTimer1->Interval = 700; break;
case 2: MsTimer1->Interval = 500; break;
case 3: MsTimer1->Interval = 300; break;
case 4: MsTimer1->Interval = 200; break;
case 5: MsTimer1->Interval = 100; break;
case 6: MsTimer1->Interval = 70; break;
case 7: MsTimer1->Interval = 50; break;
case 8: MsTimer1->Interval = 30; break;
case 9: MsTimer1->Interval = 20; break;
case 10: MsTimer1->Interval = 10; break;
case 11: MsTimer1->Interval = 7; break;
case 12: MsTimer1->Interval = 5; break;
case 13: MsTimer1->Interval = 3; break;
case 14: MsTimer1->Interval = 2; break;
case 15: MsTimer1->Interval = 1; break;
default: break;
}
}
//---------------------------------------------------------------------------
void __fastcall TForm1::MsTimer1Timer(TObject *Sender)
{
char s[1];
int itemp;
AnsiString As;
count++;
if(count == 58)count = 65;
if(count >= 91)count = 48;
Label1->Caption = count;
sprintf(s,"%c",count);
Label3->Caption = s;
bSendBuffer[0] = count;
// ƒfپ[ƒ^‘—گM
Ret = EscapeCommFunction(hPort, SETRTS);
if(Ret == FALSE){
printf("EscapeCommFunction failed.\n");
CloseHandle(hPort);
exit(0);
}
Ret = WriteFile(hPort, bSendBuffer, 1, &dwSendSize, NULL);
if(Ret == FALSE){
printf("WriteFile failed.\n");
CloseHandle(hPort);
exit(0);
}
if( ReadFile(hPort,In,1,&lRead,NULL)==0){ // ADƒRƒ“ƒoپ[ƒ^‚ج’l‚ًunsigned char ‚إ“اچ‚فپ@ژ¸”s‚µ‚½‚ç
itemp = Application->MessageBox("ƒfپ[ƒ^“ü—ح‚جƒpƒCƒv‚O‚ج“ا‚فڈo‚µ‚إƒGƒ‰پ[‚ھ”گ¶", "Œxچگ", MB_OK ) ;
if(itemp == IDYES) return;
}
sprintf(s,"%c",In[0]);
Label2->Caption = s;
As = AnsiString(s);
// RichEdit1->Lines->Add(As) ;
// RichEdit1->Text = As;
RichEdit1->SelText = As;
if(As == 'Z') RichEdit1->Lines->Add("") ;
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button2Click(TObject *Sender)
{
RichEdit1->Lines->Clear();
}
پƒ“®چىژèڈ‡پ„
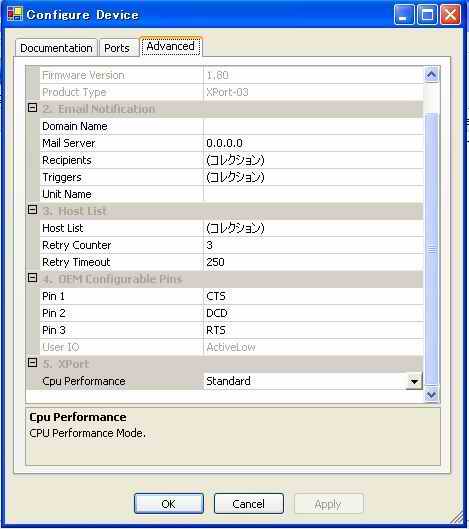
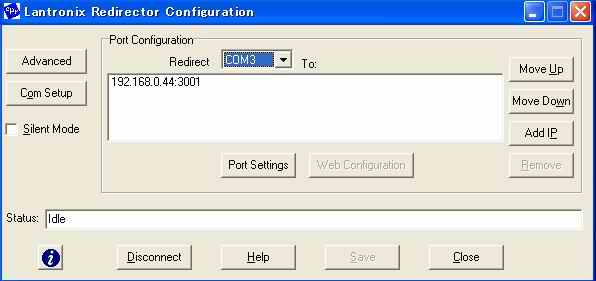
پ@‡@پ@Lantronixژذ‚جƒzپ[ƒ€ƒyپ[ƒW‚©‚çپ@ComPortRedirector‚ئDeviceInstaller‚ًƒ_ƒEƒ“ƒچپ[ƒh‚µ‚ؤPC‚ةƒCƒ“ƒXƒgپ[ƒ‹‚µ‚ـ‚·پB
پ@پ@پ@پ@پ@ˆب‰؛‚ح‰؛‹L‚جڈêچ‡‚ج‚à‚ج‚إ‚·
پ@پ@پ@پ@ Xport‘¤ پ@پ@پ@پ@پ@پ@پ@پ@IP address پ@ پ@192.168.0.44پ@پ@پ@پ@ پ@پ@ Local portپ@پ@پ@پ@پ@پ@پ@پ@پ@پ@
14001
پ@پ@پ@پ@ PC(Windows)‘¤ پ@پ@پ@IPپ@adress پ@پ@پ@192.168.0.2 پ@پ@پ@پ@پ@پ@پ@ TCP port (remote
port)پ@پ@پ@ 3001 پ@ پ@پ@پ@
پ@
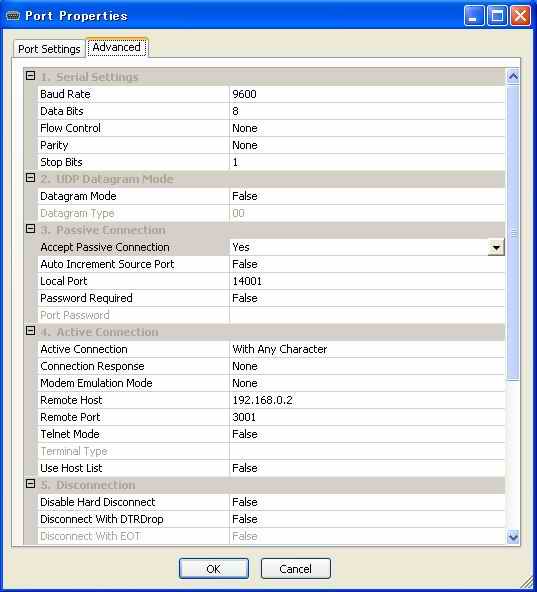
‡Aپ@Redirector‚ً‹N“®‚µ‚ؤˆب‰؛‚ج‰و–ت‚ة‚ب‚é‚و‚¤‚ةگف’肵‚ـ‚·
پ@پ@‡Bپ@ˆê•ûپ@DeviceInstaller‚ً‰؛‹L‚ج‚و‚¤‚ةگف’肵‚ـ‚·پB
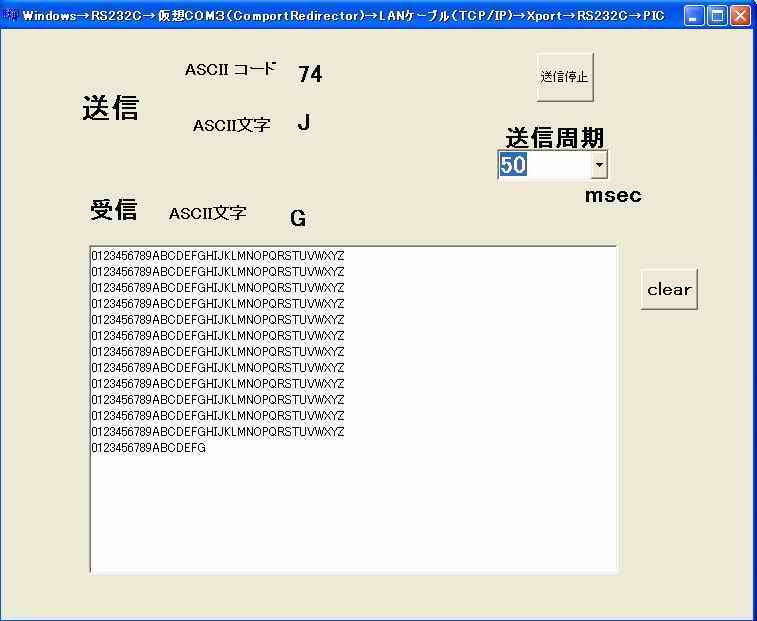
پ@پ@ ‡Cپ@‰؛‹L‚ج‚و‚¤‚بPC‘€چى‰و–ت‚©‚ç‰pگ”ژڑ‚ًPIC‘¤‚ة‘—گM‚µ‚ـ‚·پB‘—گM‚µ‚½•¶ژڑ‚جASCIIƒRپ[ƒh‚ئASCII•¶ژڑ‚ھڈم’i‚ة
پ@پ@پ@پ@پ@پ@‚ـ‚½پ@ژَگM‚µ‚½•¶ژڑ‚جASCII•¶ژڑ‚ھ‰؛’i‚ة•\ژ¦‚³‚ê‚ؤ‚¢‚ـ‚·پBپ@‰؛‹L‚ج‰و–ت‚ح50msec–ˆ‚ة‚P•¶ژڑ‚¸‚آ‘—‚ç‚ê‚ؤ
پ@پ@پ@پ@پ@پ@‚¢‚éڈêچ‡‚ج‚à‚ج‚إ‚·پB‘—گMژüٹْ‚حƒRƒ“ƒ{ƒ{ƒbƒNƒX‚إ‚Pپ`1000msec‚ج’l‚ھ‘I‘ً‚إ‚«‚é‚و‚¤‚ة‚ب‚ء‚ؤ‚¢‚ـ‚·پB
پ@پ@پ@پ@پ@پ@پ@ƒGƒfƒBƒbƒgƒ{ƒbƒNƒX‚ة‚حPIC‚©‚炱‚جƒ\ƒtƒg‚ة‘—‚ç‚ê‚ؤ‚«‚½•¶ژڑ‚ھ0‚©‚çڈ‡”ش‚ة•ہ‚ٌ‚إZ‚ـ‚إ•\ژ¦‚·‚é‚ئ‰üچs‚·‚é
پ@پ@پ@پ@پ@پ@‚و‚¤‚ة‚ب‚ء‚ؤ‚¢‚ـ‚·پB‚ـ‚½clearƒ{ƒ^ƒ“‚إ‚¢‚آ‚إ‚à‚±‚جƒGƒfƒBƒbƒgƒ{ƒbƒNƒX‚حƒNƒٹƒA‚إ‚«‚ـ‚·پB
‘—گM‚µ‚½•¶ژڑ‚ھ J ‚إژَگM‚µ‚½•¶ژڑ‚ھ
G ‚ئ‚ب‚ء‚ؤ‚¢‚ؤ‘—گM‚ئژَگM‚إ‚©‚ب‚è‚جژچ·‚ھ”گ¶‚µ‚ؤ‚¢‚邱‚ئ‚ھ‚ي‚©‚è
پ@پ@پ@پ@پ@پ@‚ـ‚·پB
پ@پ@پ@‡Dپ@PIC‘¤‚ج‰tڈ»‚ة‚ح‘—گM‚³‚ê‚ؤ‚«‚½ڈ‡”ش‚ة•¶ژڑ‚ھ•\ژ¦‚³‚ê‚é‚و‚¤‚ة‚ب‚ء‚ؤ‚¢‚ـ‚·پB•¶ژڑ‚ھ‚¢‚ء‚د‚¢‚ة‚ب‚é‚ئ
پ@پ@پ@پ@پ@‰tڈ»‚ھƒNƒٹƒA‚³‚ê‚ؤپ@چؤ‚ر‘—گM‚³‚ê‚ؤ‚«‚½•¶ژڑ‚ھ•\ژ¦‚³‚ê‚ـ‚·پBپiژتگ^ژQڈئپj

پ@پ@
پ@پ@
پ@